1. What is the Error Frame in CAN protocol?
Error frame is generated by node that detects error in the CAN network. The Error frame format can be seen below-
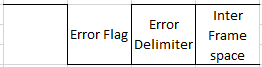
Error Flag : The error flag can be error active or error passive.
The Active Error Frame is generated when the sender and receiver both reject the erroneous frame. The Error flag in Active error frame is Dominant.
The Passive Error Frame is generated when the receiver can still receive the frames. The Error flag in Passive error frame is Recessive.
Error Delimiter : The Error Delimiter contains 8 recessive bit which allows the buts nodes to restart bus communication appropriately after an error.
The Error Frame basically interrupts the transmission by generating active error flag.
2. What is the difference between Active and Passive Error Frame in CAN Protocol?
The Active Error Frame is generated when the sender and receiver both reject the erroneous frame.
The Error flag in Active error frame is Dominant.
The Passive Error Frame is generated when the receiver can still receive the frames.
The Error flag in Passive error frame is Recessive.
3. What is a Overload frame in CAN protocol?

When the node is busy in receiving a message and cannot receive next message the overload frame is generated to delay transmission of message from the transmitter.
The Overload frame can only be generated during the Interframe space.
Similar to the Error Frame. it contains Overload flag and Overload Delimiter.
4. What is Interframe Space in CAN Protocol?
The interframe space allows internal processing before the next CAN message transmission is started by a node.
The Interframe Space is 3 bits long.
5. How many number of bits are present in between two CAN frames in total?
The ACK delimiter is 1 bit long.
The End of Frame is 7 bits long.
The Interframe space is 3 bits long.
6. What are different types of Error in CAN protocol?
There are mainly 5 types of Errors in CAN –
- Bit Error – When the received bit is not equal to the transmitted bit, the error is called as a Bit Error. This excludes the Arbitration, ACK fields.
- Stuff Error – When more that 5 bits of same polarity ( i.e. Dominant or Recessive) are seen in a CAN bit stream, the type of error generated is called as Stuff Error.
- CRC Error – When the CRC that is sent over CAN frame does not match with the CRC value that is calculated at the receiver, the type of error generated is called as CRC Error.
- Form Error – When there is a violation in the fixed fields in CAN frame format, the type of error generated is called as Form Error. For example, we know that the Delimiter bit is always recessive in CAN frame format, if the Delimiter is seen as Dominant then the Form Error shall be generated.
- ACK Error – The transmitter sends ACK slot as Recessive bit and should receive dominant bit after receiver acknowledges that it has received the CAN message, but if the ACK slot is not detected as Dominant by the transmitter, the ACK error is generated.
7. How is the synchronization performed in CAN protocol?
The synchronization at the start of CAN frame is performed using Hard-synch using the Start of Frame leading edge which is a Dominant bit. But re-synchronization is required due to delays which is achieved using the CAN bit timing parameters.
8. What is Bit Timing in CAN Protocol?
The Bit Timing is the time required to transmit a single bit in CAN.
The bit time consists of below four segments-
- Synchronization Segment
- Propagation Segment
- Phase Segment 1
- Phase Segment 2